elasticsearch设计的理念就是分布式搜索引擎,底层实现还是基于Lucene的,核心思想是在多态机器上启动多个es进程实例,组成一个es集群。
1.集群(cluster)
一个集群有多个节点(服务器)组成,通过所有的节点一起保存你的全部数据并且通过联合索引和搜索功能的节点的集合,每一个集群有一个唯一的名称标识
2.节点(node)
一个节点就是一个单一的服务器,是你的集群的一部分,存储数据,并且参与集群和搜索功能,一个节点可以通过配置特定的名称来加入特定的集群,在一个集群中,你想启动多少个节点就可以启动多少个节点
3.索引(index)
一个索引就是还有某些共有特性的文档的集合,一个索引被一个名称唯一标识,并且这个名称被用于索引通过文档去执行搜索,更新和删除操作
4.类型(type)
6.0以上的版本已经不建议使用type了,默认为_doc
5.文档(document)
一个文档是一个基本的搜索单元
总结:es 中存储数据的基本单位是索引,比如说你现在要在 es 中存储一些订单数据,你就应该在 es 中创建一个索引 order_idx,所有的订单数据就都写到这个索引里面去,一个索引差不多就是相当于是 mysql 里的一张表。
index -> type -> mapping -> document -> field。
index 相当于 mysql 里的一张表。在高版本的es里已经不建议使用type了(es7.x 已经完全移除了mapping type), 可以认为你可以认为 index 是一个类别的表,具体的每个 type 代表了 mysql中的一个表。而 mapping 就是这个 type 的表结构定义,定义了这个表的字段和类型。你往 index 里的一个 type 里面写的一条数据,叫做一条 document,一条 document 就代表了 mysql 中某个表里的一行,每个 document 有多个 field,每个 field 就代表了这个 document 中的一个字段的值。
ES默认为一个索引创建5个主分片, 并分别为其创建一个副本分片. 也就是说每个索引都由5个主分片成本, 而每个主分片都相应的有一个copy
1.分片(shards)
在一个搜索里存储的数据,潜在的情况下可能会超过单个节点的硬件的存储限制,为了解决这个问题,elasticsearch便提供了分片的功能,它可以将索引划分为多个分片,当你创建一个索引的时候,你就可以简单的定义你想要的分片的数量,每一个分片本身是一个全功能的完全独立的索引,可以部署到集群中的任何一个节点。
2.复制(replica)
在一个网络情况下,故障可能会随时发生,有一个故障恢复机制是必须的,为了达到这个目的,ES允许你制作一个或多个拷贝放入一个叫做复制分片或短暂的复制品中。replica 主要解决以下两个问题:
(1)高可用:它提供了高可用的以来防止分片或者节点宕机,为此,一个非常重要的注意点就是绝对不要讲一个分片的拷贝放在跟这个分片相同的机器上
(2)高并发:它允许你的分片可以提供超出自身吞吐量的搜索服务,搜索行为可以在分片所有的拷贝中并行执行。
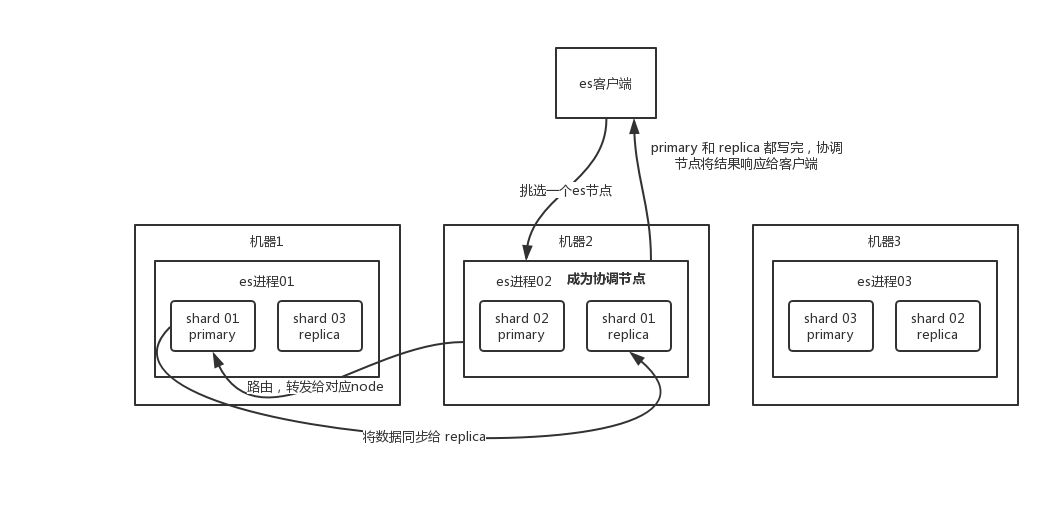
总之,一个完整的流程就是,ES客户端将一份数据写入primary shard,它会将分成成对的shard分片,并将数据进行复制,ES客户端取数据的时候就会在replica或primary 的shard中去读。ES集群有多个节点,会自动选举一个节点为master节点,这个master节点其实就是干一些管理类的操作,比如维护元数据,负责切换primary shard 和replica shard的身份之类的,要是master节点宕机了,那么就会重新选举下一个节点为master为节点。如果时非master宕机了,那么就会有master节点,让那个宕机的节点上的primary shard的身份转移到replica shard上,如果修复了宕机的那台机器,重启之后,master节点就会控制将缺失的replica shard 分配过去,同步后续的修改工作,让集群恢复正常。

translog 日志文件之中refresh 到一个新的 segment file 中,但是此时数据不是直接进入 segment file 磁盘文件,而是先进入 os cache
。这个过程就是 refresh。(操作系统里面,磁盘文件其实都有一个东西,叫做 os cache,即操作系统缓存,就是说数据写入磁盘文件之前,会先进入 os cache,先进入操作系统级别的一个内存缓存中去。只要 buffer 中的数据被 refresh 操作刷入 os cache中,这个数据就可以被搜索到了。)segment file,每秒钟会产生一个新的磁盘文件 segment file,这个 segment file 中就存储最近 1 秒内 buffer
中写入的数据。但是如果 buffer 里面此时没有数据,那当然不会执行 refresh 操作,如果buffer里面有数据,默认 1 秒钟执行一次 refresh 操作,刷入一个新的 segment file 中。(为什么叫 es 是准实时的? NRT,全称 near real-time。默认是每隔 1 秒 refresh 一次的,所以 es 是准实时的,因为写入的数据 1 秒之后才能被看到。可以通过 es 的 restful api 或者 java api,手动执行一次 refresh 操作,就是手动将 buffer 中的数据刷入 os cache中,让数据立马就可以被搜索到。只要数据被输入 os cache 中,buffer 就会被清空了,因为不需要保留 buffer 了,数据在 translog 里面已经持久化到磁盘去一份了。)commit 操作。commit 操作发生第一步,就是将 buffer 中现有数据 refresh 到 os cache 中去,清空 buffer。然后,将一个 commit point 写入磁盘文件,里面标识着这个 commit point 对应的所有 segment file,同时强行将 os cache 中目前所有的数据都 fsync 到磁盘文件中去。最后清空 现有 translog 日志文件,重启一个 translog,此时 commit 操作完成。这个 commit 操作叫做 flush。默认 30 分钟自动执行一次 flush,但如果 translog 过大,也会触发 flush。flush 操作就对应着 commit 的全过程,我们可以通过 es api,手动执行 flush 操作,手动将 os cache 中的数据 fsync 强刷到磁盘上去。数据写入 segment file 之后,同时就建立好了倒排索引。
.del 文件,里面将某个 doc 标识为 deleted 状态,那么搜索的时候根据 .del 文件就知道这个 doc 是否被删除了deleted 状态,然后新写入一条数据。buffer 每次 refresh 一次,就会产生一个 segment file,所以默认情况下是 1 秒钟一个 segment file,这样下来 segment file 会越来越多,此时会定期执行 merge。每次 merge 的时候,会将多个 segment file 合并成一个,同时这里会将标识为 deleted 的 doc 给物理删除掉,然后将新的 segment file 写入磁盘,这里会写一个 commit point,标识所有新的 segment file,然后打开 segment file 供搜索使用,同时删除旧的 segment file。
可以通过 doc id 来查询,会根据 doc id 进行 hash,判断出来当时把 doc id 分配到了哪个 shard 上面去,从那个 shard 去查询。
coordinate nodecoordinate node 对 doc id 进行哈希路由,将请求转发到对应的 node,此时会使用 round-robin 随机轮询算法,在 primary shard 以及其所有 replica 中随机选择一个,让读请求负载均衡在搜索引擎中,每个文档都有一个对应的文档 ID,文档内容被表示为一系列关键词的集合。例如,文档 1 经过分词,提取了 20 个关键词,每个关键词都会记录它在文档中出现的次数和出现位置。
那么,倒排索引就是关键词(分词)到文档 ID 的映射,每个关键词都对应着一系列的文件,这些文件中都出现了关键词
假如文档如下
DocId | Doc |
|---|---|
1 | 谷歌地图之父跳槽 Facebook |
2 | 谷歌地图之父加盟 Facebook |
3 | 谷歌地图创始人拉斯离开谷歌加盟 Facebook |
4 | 谷歌地图之父跳槽 Facebook 与 Wave 项目取消有关 |
5 | 谷歌地图之父拉斯加盟社交网站 Facebook |
对文档进行分词之后,得到以下倒排索引。 | |
WordId | Word |
—— | —— |
1 | 谷歌 |
2 | 地图 |
3 | 之父 |
4 | 跳槽 |
5 | |
6 | 加盟 |
7 | 创始人 |
8 | 拉斯 |
9 | 离开 |
10 | 与 |

往 es 里写的数据,实际上都写到磁盘文件里去了,查询的时候,操作系统会将磁盘文件里的数据自动缓存到 filesystem cache 里面去
es 的搜索引擎严重依赖于底层的 filesystem cache,你如果给 filesystem cache 更多的内存,尽量让内存可以容纳所有的 idx segment file 索引数据文件,那么你搜索的时候就基本都是走内存的,性能会非常高。如果走磁盘一般肯定上秒,搜索性能绝对是秒级别的,1秒、5秒、10秒。但如果是走 filesystem cache,是走纯内存的,那么一般来说性能比走磁盘要高一个数量级,基本上就是毫秒级的,从几毫秒到几百毫秒不等。
如果要利用好filesystem cache的空间,就需要只存储常用来检索的几个字段就好了, 其他不常用的字段存储在mysql或hbase中, 常用的是采用 es + hbase 这种架构
写入 es 的数据最好小于等于,或者是略微大于 es 的 filesystem cache 的内存容量。然后你从 es 检索可能就花费 20ms,然后再根据 es 返回的 id 去 hbase 里查询在花个 30ms,查 20 条数据,可能也就耗费个 30ms。如果1T数据全部存es会每次查询都是 5~10s。
如果数据实在太大,远超filesystem cache, 就可以采用数据预热
举个例子,拿微博来说,你可以把一些大V,平时看的人很多的数据,你自己提前后台搞个系统,每隔一会儿,自己的后台系统去搜索一下热数据,刷到 filesystem cache 里去,后面用户实际上来看这个热数据的时候,他们就是直接从内存里搜索了,很快。
或者是电商,你可以将平时查看最多的一些商品,比如说 iphone 8,热数据提前后台搞个程序,每隔 1 分钟自己主动访问一次,刷到 filesystem cache 里去。
对于那些你觉得比较热的,经常会有人访问的数据,最好做一个专门的缓存预热子系统,就是对热数据每隔一段时间,就提前访问一下,让数据进入 filesystem cache 里面去。这样下次别人访问的时候,一定性能会好一些。
es 可以做类似于 mysql 的水平拆分,就是说将大量的访问很少、频率很低的数据,单独写一个索引,然后将访问很频繁的热数据单独写一个索引。最好是将冷数据写入一个索引中,然后热数据写入另外一个索引中,这样可以确保热数据在被预热之后,尽量都让他们留在 filesystem os cache 里,别让冷数据给冲刷掉。
对于 MySQL,我们经常有一些复杂的关联查询。在 es 里该怎么玩儿,es 里面的复杂的关联查询尽量别用,一旦用了性能一般都不太好。
最好是先在 Java 系统里就完成关联,将关联好的数据直接写入 es 中。搜索的时候,就不需要利用 es 的搜索语法来完成 join 之类的关联搜索了。
document 模型设计是非常重要的,很多操作,不要在搜索的时候才想去执行各种复杂的乱七八糟的操作。es 能支持的操作就是那么多,不要考虑用 es 做一些它不好操作的事情。如果真的有那种操作,尽量在 document 模型设计的时候,写入的时候就完成。另外对于一些太复杂的操作,比如 join/nested/parent-child 搜索都要尽量避免,性能都很差的。
es 的分页是较坑的,为啥呢?举个例子吧,假如你每页是 10 条数据,你现在要查询第 100 页,实际上是会把每个 shard 上存储的前 1000 条数据都查到一个协调节点上,如果你有个 5 个 shard,那么就有 5000 条数据,接着协调节点对这 5000 条数据进行一些合并、处理,再获取到最终第 100 页的 10 条数据。
分布式的,你要查第 100 页的 10 条数据,不可能说从 5 个 shard,每个 shard 就查 2 条数据?最后到协调节点合并成 10 条数据?你必须得从每个 shard 都查 1000 条数据过来,然后根据你的需求进行排序、筛选等等操作,最后再次分页,拿到里面第 100 页的数据。你翻页的时候,翻的越深,每个 shard 返回的数据就越多,而且协调节点处理的时间越长,非常坑爹。所以用 es 做分页的时候,你会发现越翻到后面,就越是慢。
对此的解决方案是: